热线电话:400-608-3331

六自由度加载振动平台
目前结构或构件加载实验中最大的困难就是如何准确模拟边界条件,即使最为常见的梁、板、柱等构件加载实验也无法做到。以柱子实验为例,柱端在结构中所受到的载荷是六维的(三个平动的力和三个转动力矩)。将柱子作为试件从结构中取出,若要准确模拟柱端的受力或变形,则要对试件的柱端施加六维的力或六维的变形,遗憾的是目前实验室中还很少有能够完成这种实验的设备。通常的做法是简化受力模型、简化边界条件。已经实现的实验如:轴向和水平向共同加载、三向加载、同时施加双向和扭转载荷。由于是不完全约束柱的端面,所以在非加载方向存在自由变形,这种实验结果与完全模拟六维边界条件的实验结果有多大的差别,目前还难以估计。一种严格意义上的比较是对于相同的试件,给定六维加载规则(如六维的力加载路径或位移加载路径),实验1完全按六维规则加载,实验2仅仅在试件上施加少于六维的力或位移,然后比较二者的实验结果,则可以分析判断由于简化边界条件加载所带来的误差。这仅仅是讨论柱子的实验情况,六维加载设备的应用远不止于此,再进一步考虑到动态加载能力,只要尺寸、空间和承载力满足,其应用领域和范围是非常广泛的。
大型六维加载系统技术参数

*表中数据是以 Z 向 20000kN 为基础配置的。
1、概述
六自由度Stewart 并联平台具有刚度大、承载能力强、动态响应快等优点,已经获得广泛的应用,如加工中心、机器人、运动模拟器、空间宇航器对接、水下救援器对接、大型射电望远镜的轨迹精密控制等。但是这些应用都是以位姿控制为基础的,与之相对应的力姿控制也将具有广泛的应用需求。本文是在文献1 的基础上,对六自由度Stewart 并联平台进行了力控制分析和技术开发,并在样机上进行了调试,实现了六自由度Stewart 并联平台的力姿控制。
2、实验验证

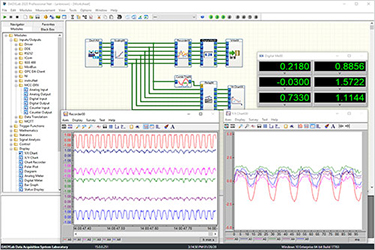
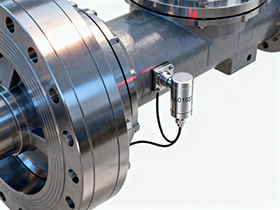
图1 六自由度Stewart并联平台力控制实验系统

图2 力控制实验系统软件

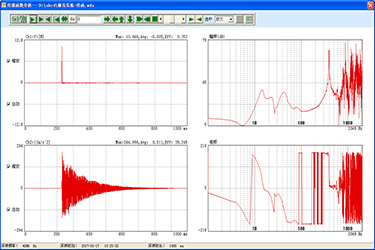
图3 Z方向的正弦波力命令信号

图4 Z方向的位移曲线

图5 XYZ三方向的力命令信号

图6 XYZ三方向输入力命令的平台位姿
实验系统如图1 所示,上平台与框架横梁固定,为上平台提供反力。力控制软件如图2 所示,该软件可以进行力姿控制,也可以进行位姿控制,并且可以进行位姿和力姿两种控制模式的实时转换。实验进行了多种工况,这里给出部分测试结果。图3 是Z 方向给定的正弦波力命令值,图4 是Z 方向的对应位移结果;图5 是X、Y 和Z 三方向给定的力命令值,图6 是X、Y 和Z 三方向的测得的位移和转角(即位姿)结果。从实验情况来看,实验过程工作正常,力姿控制能够顺利进行,实现了力控制功能。